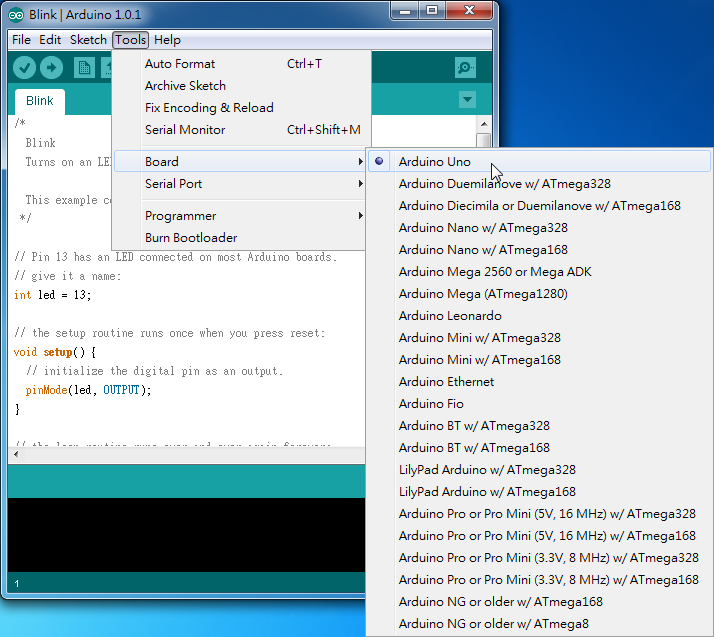
If you do not already have the Arduino IDE installed on your computer please go to the download page here: http://arduino.cc/en/Main/Software
Once you have the Arduino program open go to Tools > Board > Arduino Uno. This sets the board target as the Arduino Uno, this board uses the exact same IC chip as the one included with the letry kits (ATMEGA328) it just does not have a PCB(printed circuit board) attached to it.
Now go to File > Examples > 03.Analog > AnalogInput and open the file.
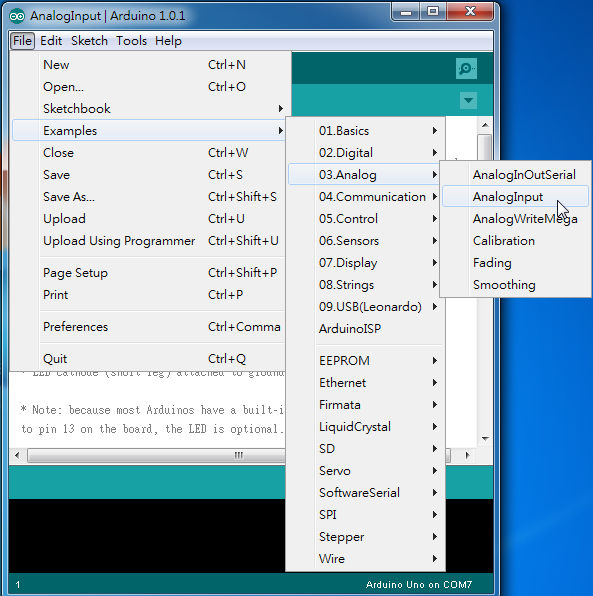
The “AnalogInput” program you have just loaded contains the following code:
int sensorPin = A0; // select the input pin for the potentiometer
int ledPin = 13; // select the pin for the LED
int sensorValue = 0; // variable to store the value coming from the sensor
void setup() {
// declare the ledPin as an OUTPUT:
pinMode(ledPin, OUTPUT);
}
void loop() {
// read the value from the sensor:
sensorValue = analogRead(sensorPin);
// turn the ledPin on
digitalWrite(ledPin, HIGH);
// stop the program for <sensorValue> milliseconds:
delay(sensorValue);
// turn the ledPin off:
digitalWrite(ledPin, LOW);
// stop the program for for <sensorValue> milliseconds:
delay(sensorValue);
}
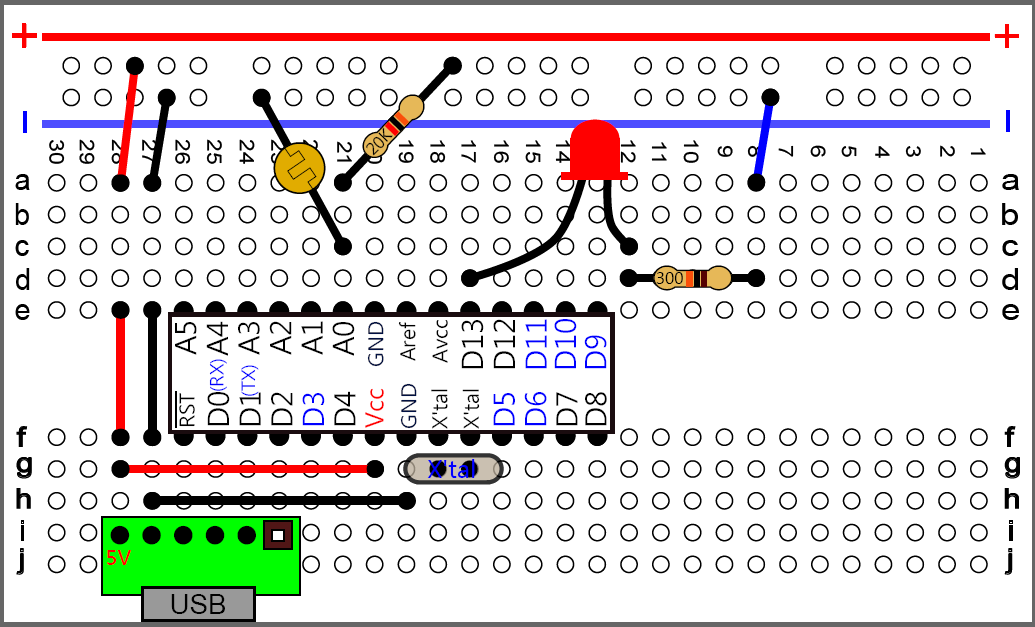
Now you have completed the basic software setup side of things 🙂 what remains is the fun task of wiring up the hardware!
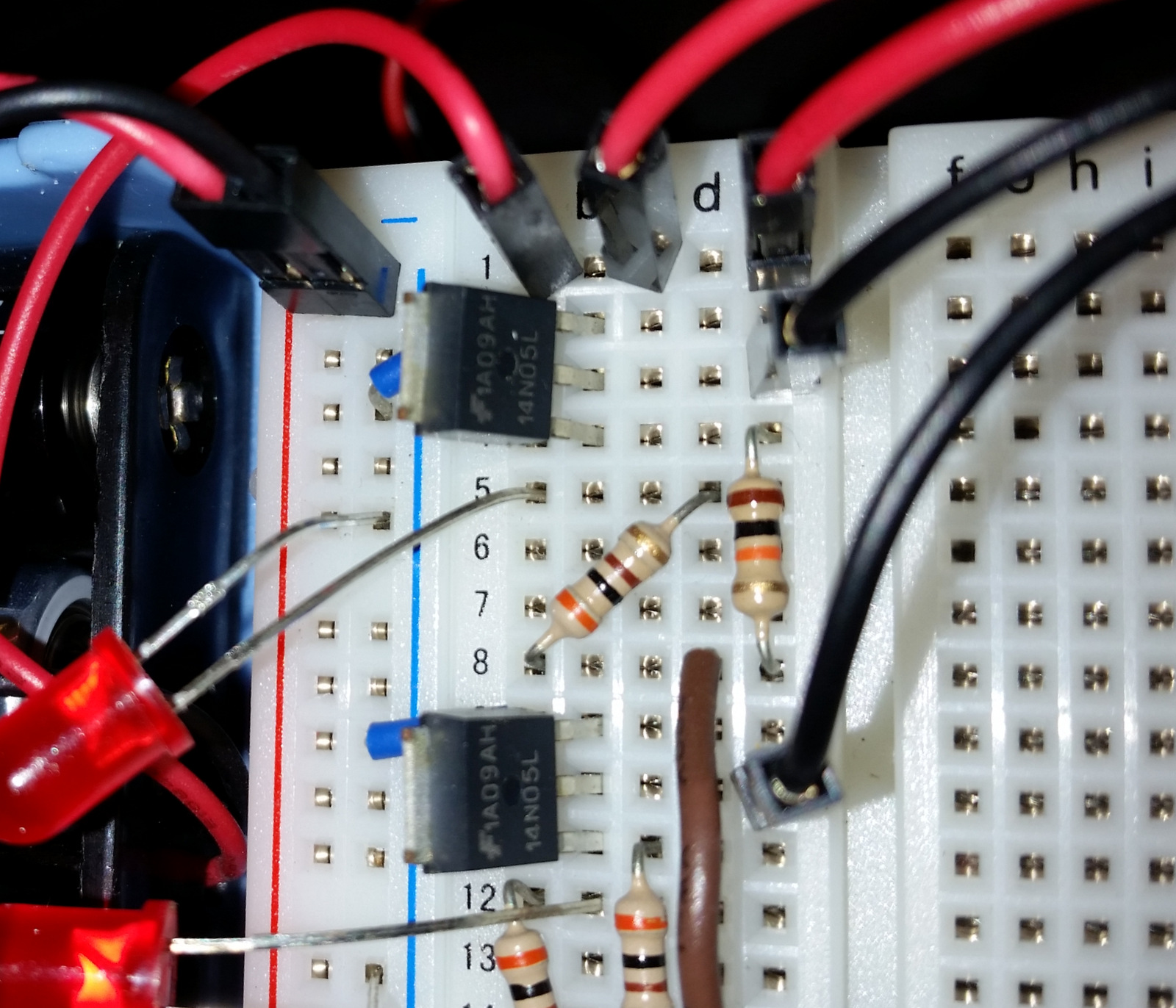
Warning: when inserting and removing large ICs like the ATMEGA328 from the breadboard, keep both sides parallel to the breadboard, sometimes it helps to use a small flat head screw driver to pry up each side evenly when removing. If you pull up only one side at an angle you will bend the pins, potentially breaking them off.
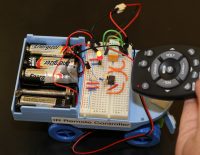
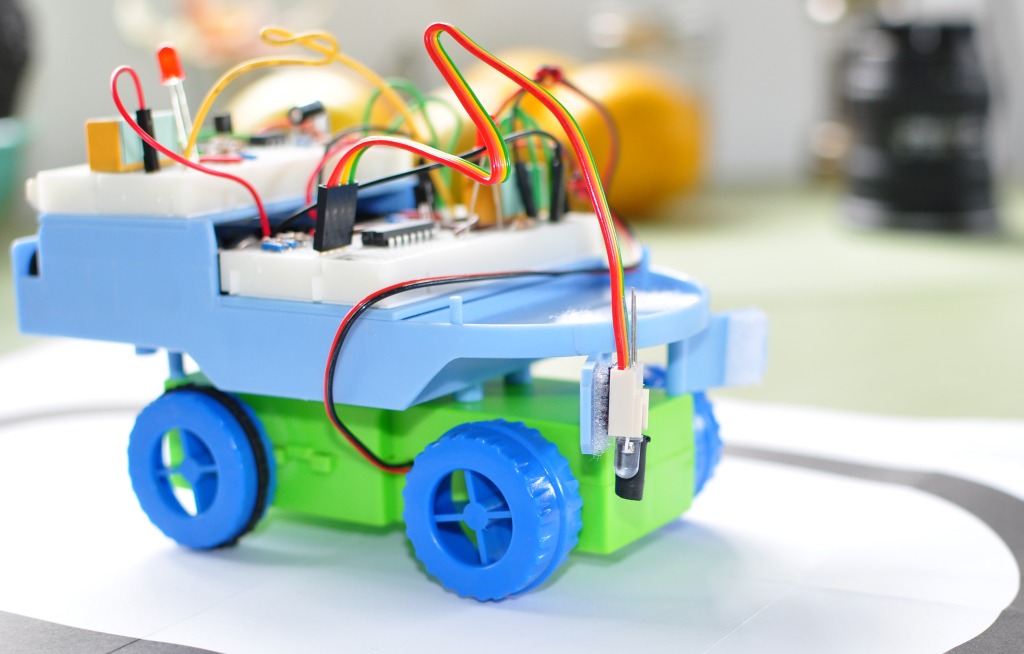
This project allows you to steer the Letry robot with any normal TV/DVD player IR remote. The robot drives forward in a straight line until it receives a signal from the IR remote, as soon as it does it will start turning for a set time. To adjust how long the turn lasts you can experiment with the value of R3 and C1.
The C1 capacitor can be changed from 100uf to 10uf, see what happens! Why do you think this is?
Almost any common IR remote control from your TV or DVD player will work, as long as it sends out its IR pulses at 38Khz it will work, 38khz is the most commonly used frequency.
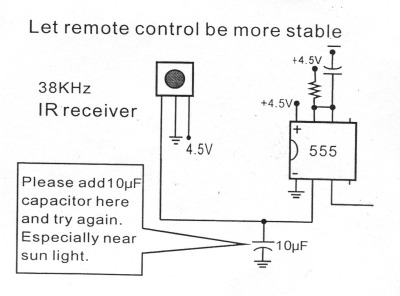
Letry IR schematic Update
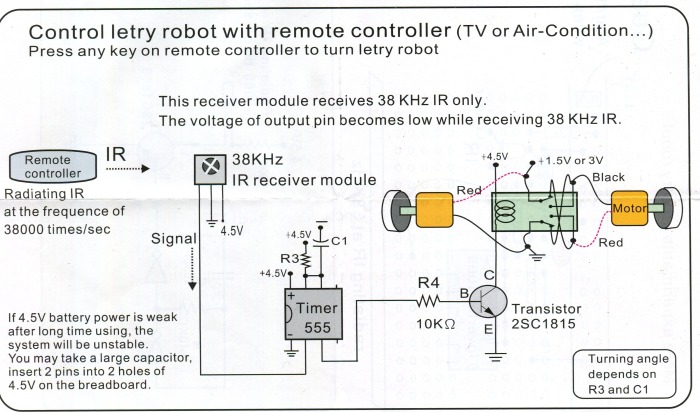
Letry IR Receiver Schematic
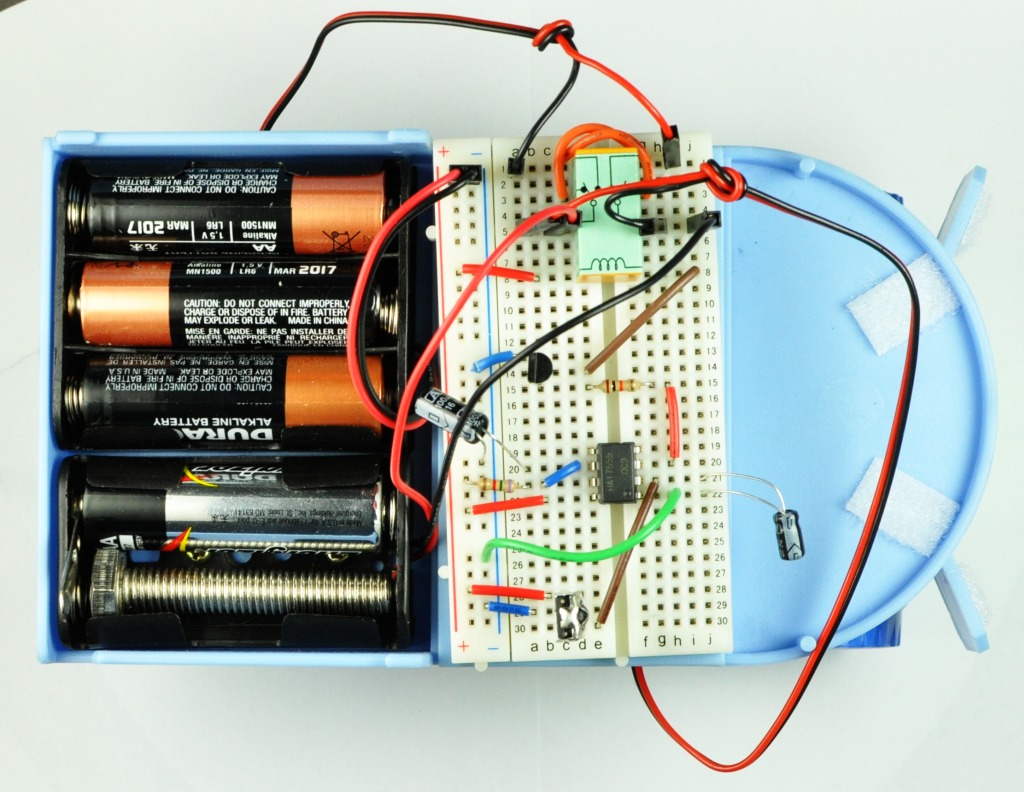
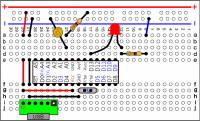
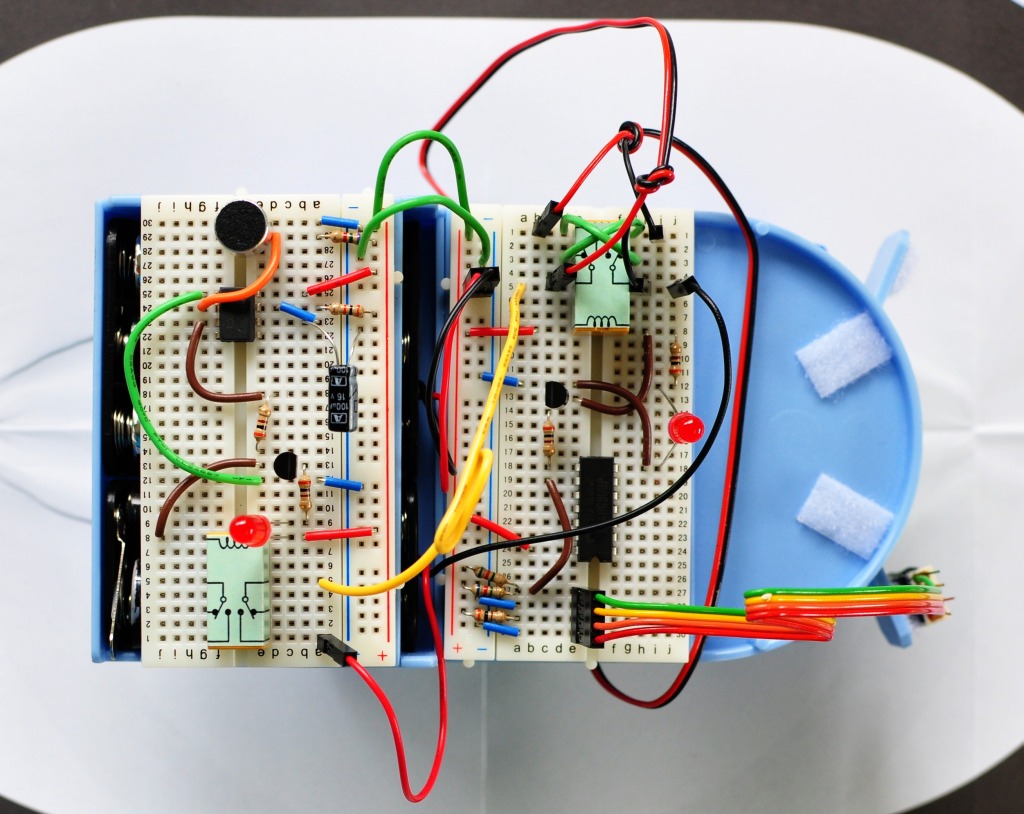
IR Receiver Layout
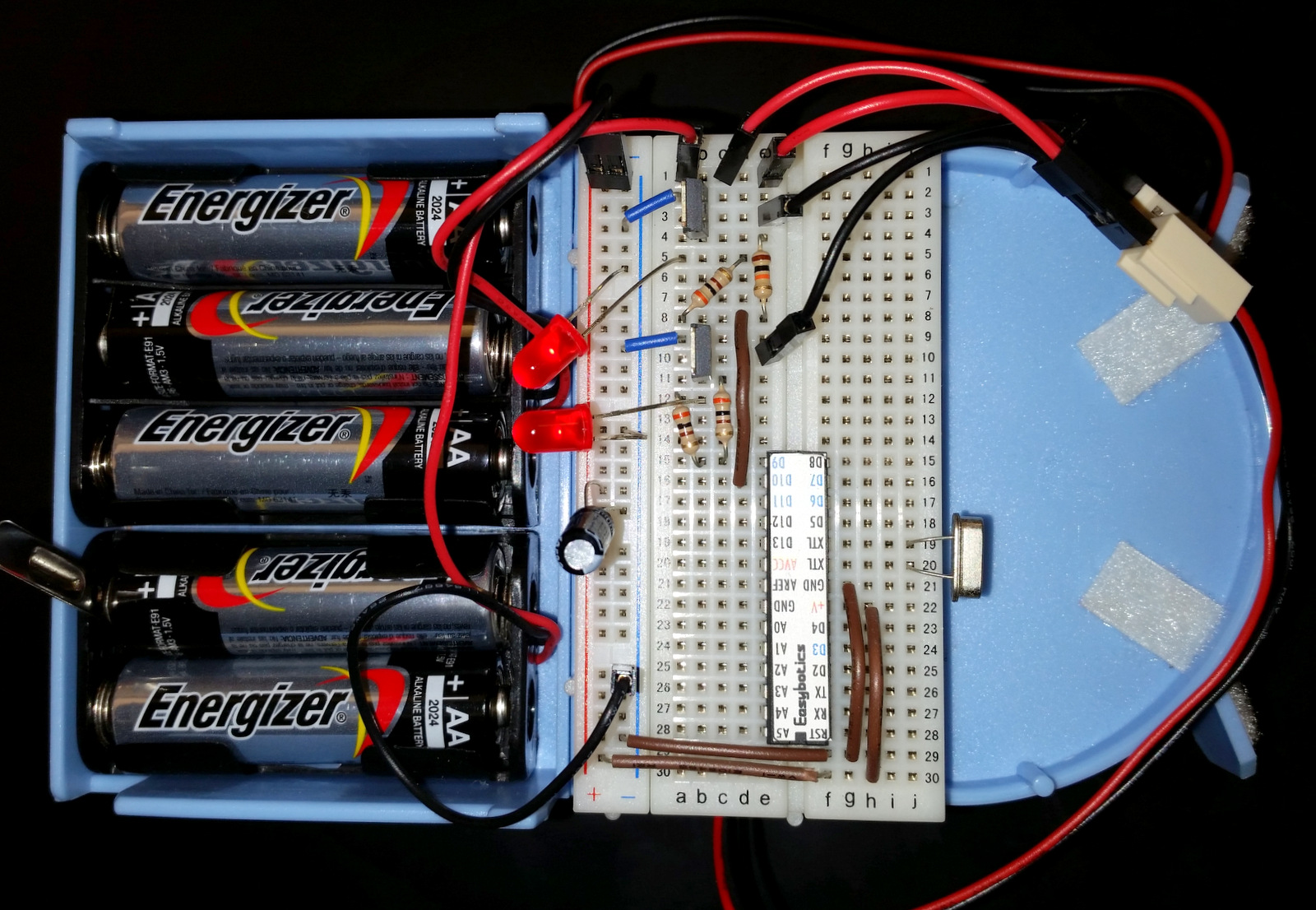
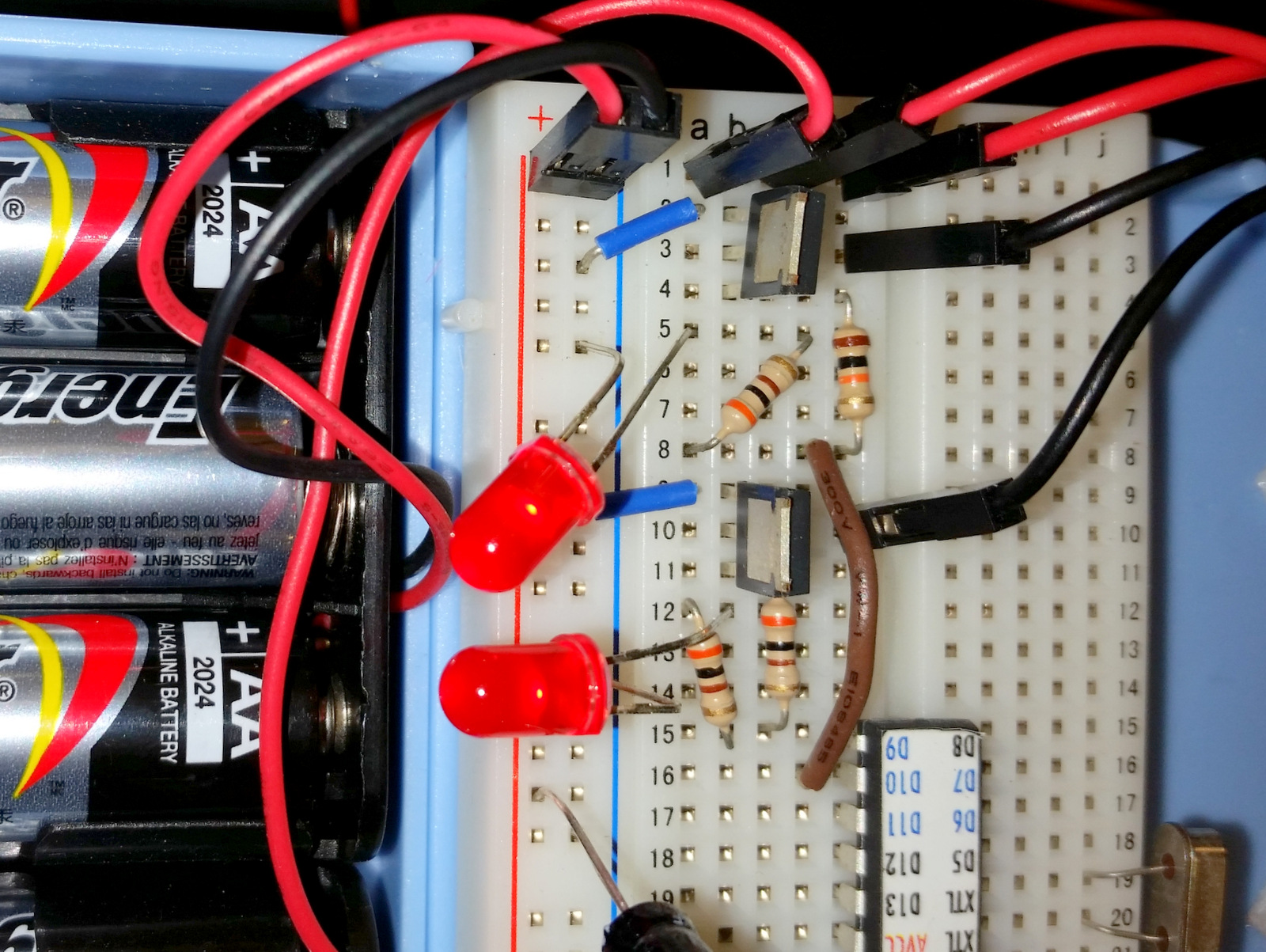
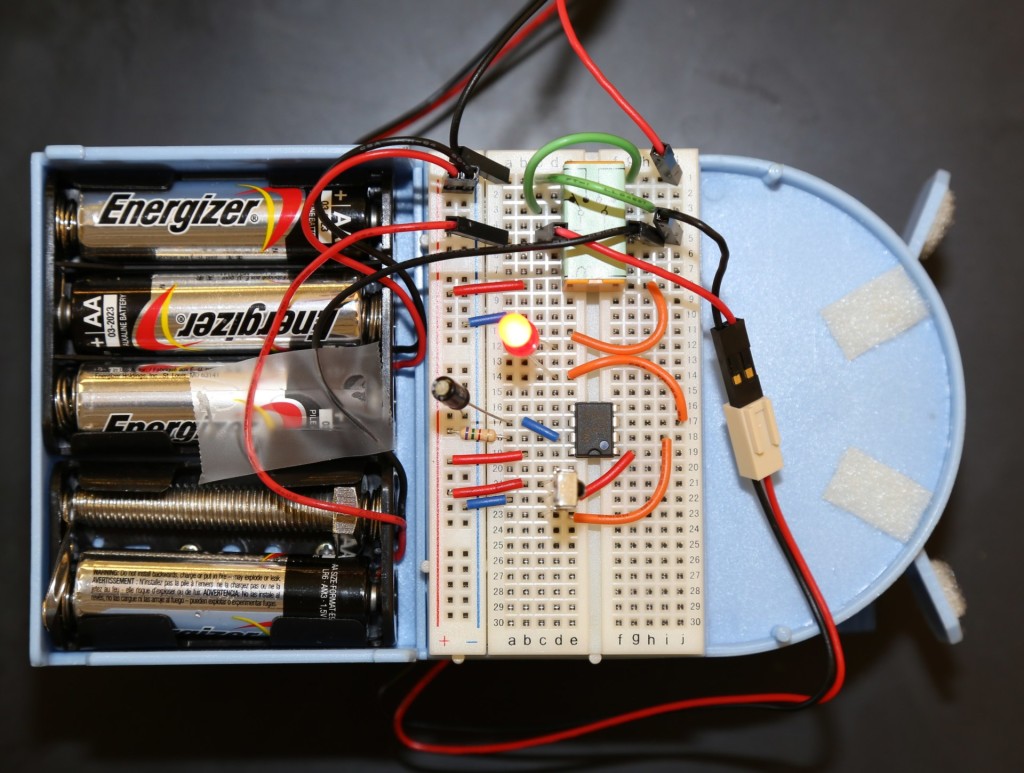
NOTE: The following two images may look like entirely different circuits to you! they are not! but do have some changes in the wire placement from the previous image, either one will work.
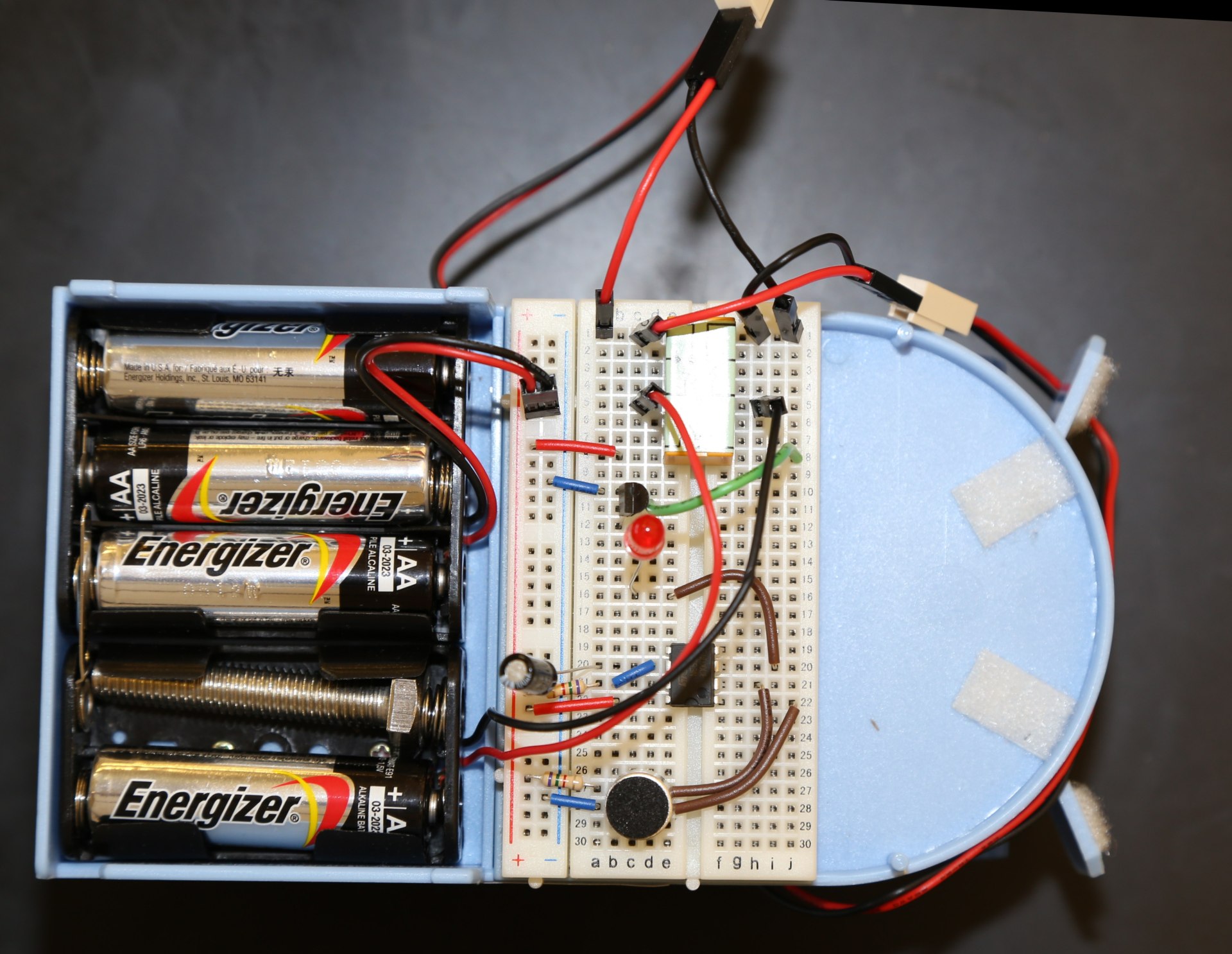
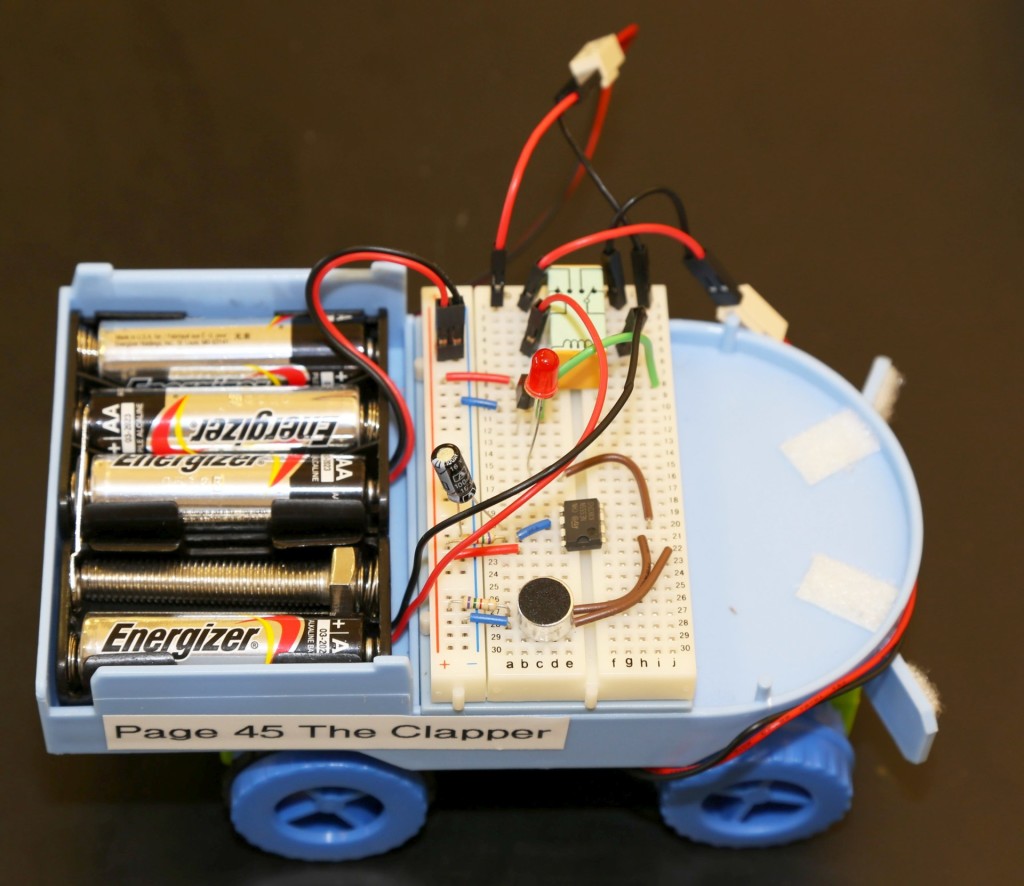
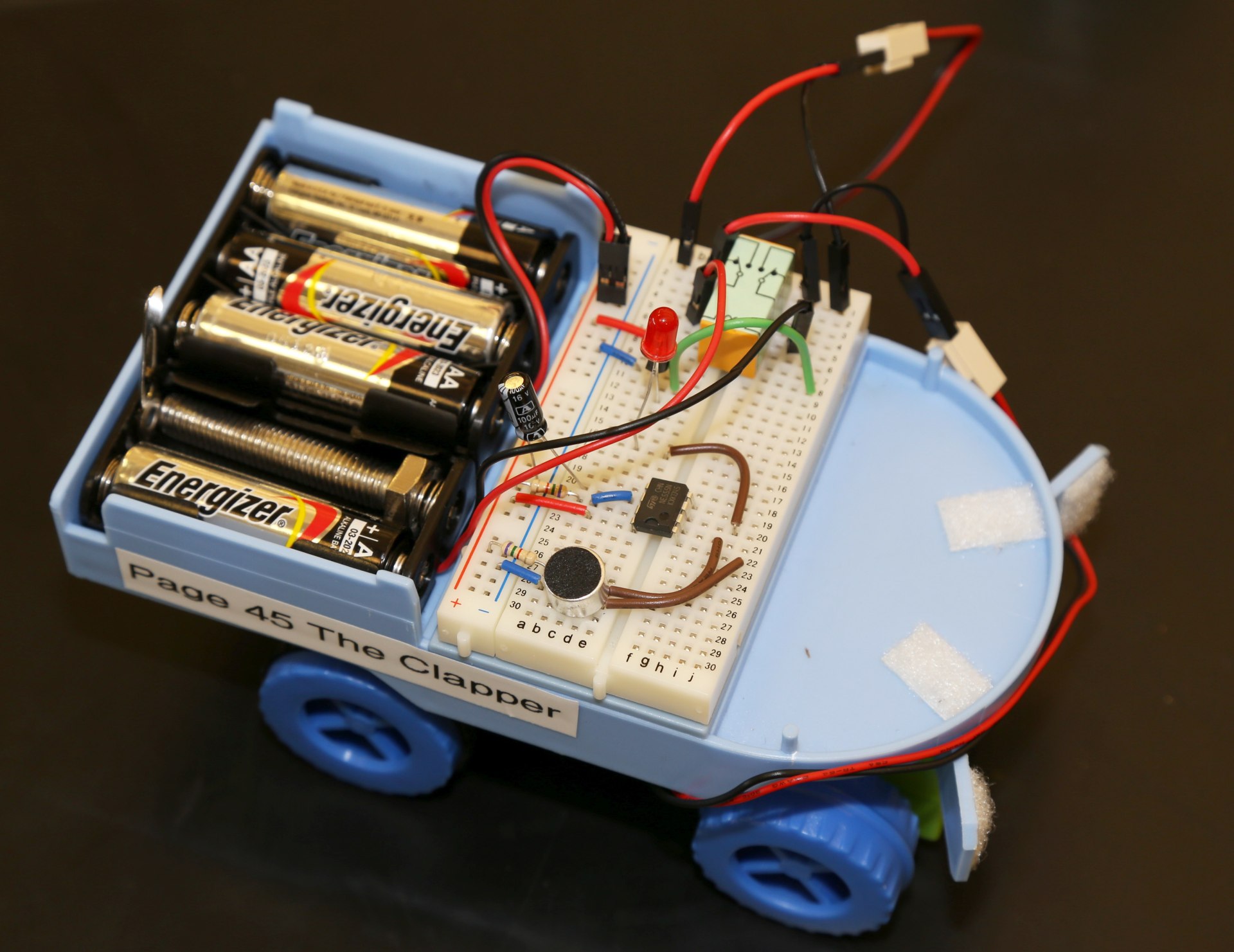
The following two images show how you can use a red LED (Watch polarity!) to provide visual indication when the microphone input is triggered.
the transistor is behind the red LED in this image, you can see its placement in the last image.


Applies to Letry A002,B001,B002
When the microphone detects sound the first relay is activated, providing power to the second circuit which follows the black line using an IR reflective sensor.
The red LEDs are optional but recommended as they allow you to see the state of the relays easily.
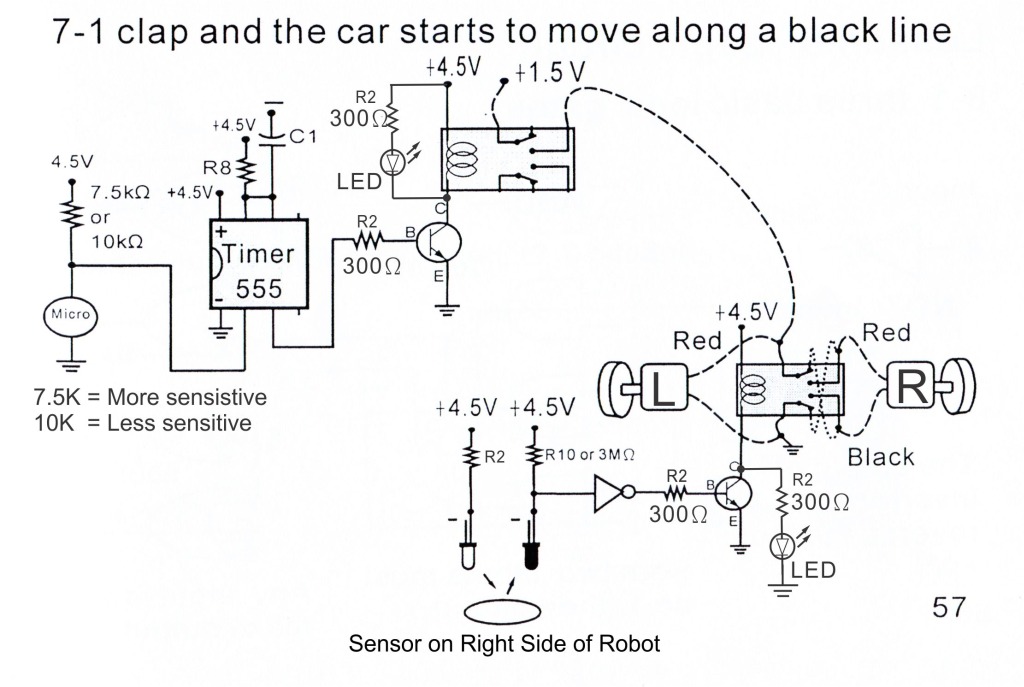

The sound activated circuit on page 45 of the letry manual is presented below:
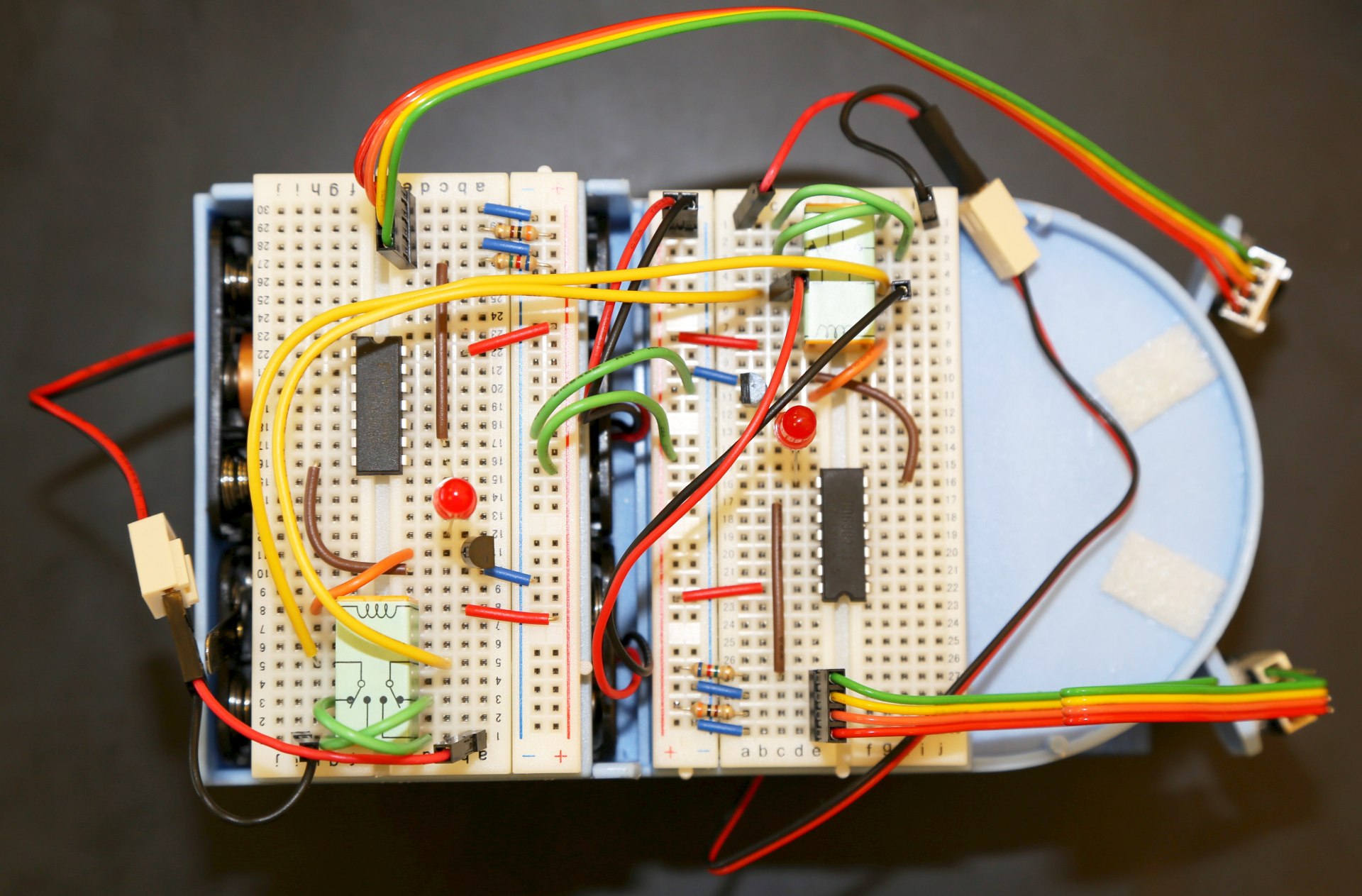
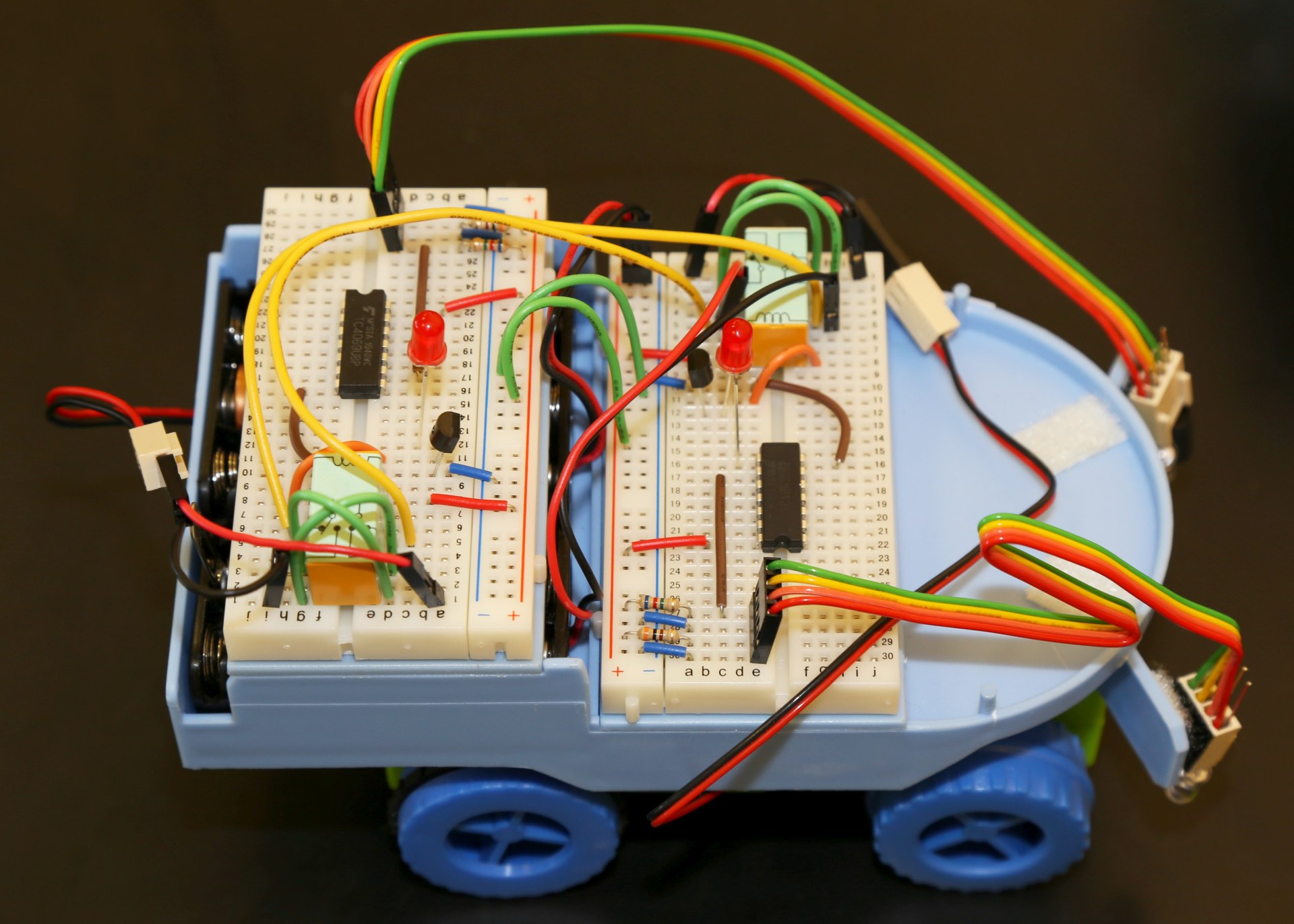
This circuit allows the robot to respond to two IR reflective sensors at the same time, allowing it to avoid obstacles on either the left or right sides, or (once the motor leads are switched) to track a black line as provided in the kit.
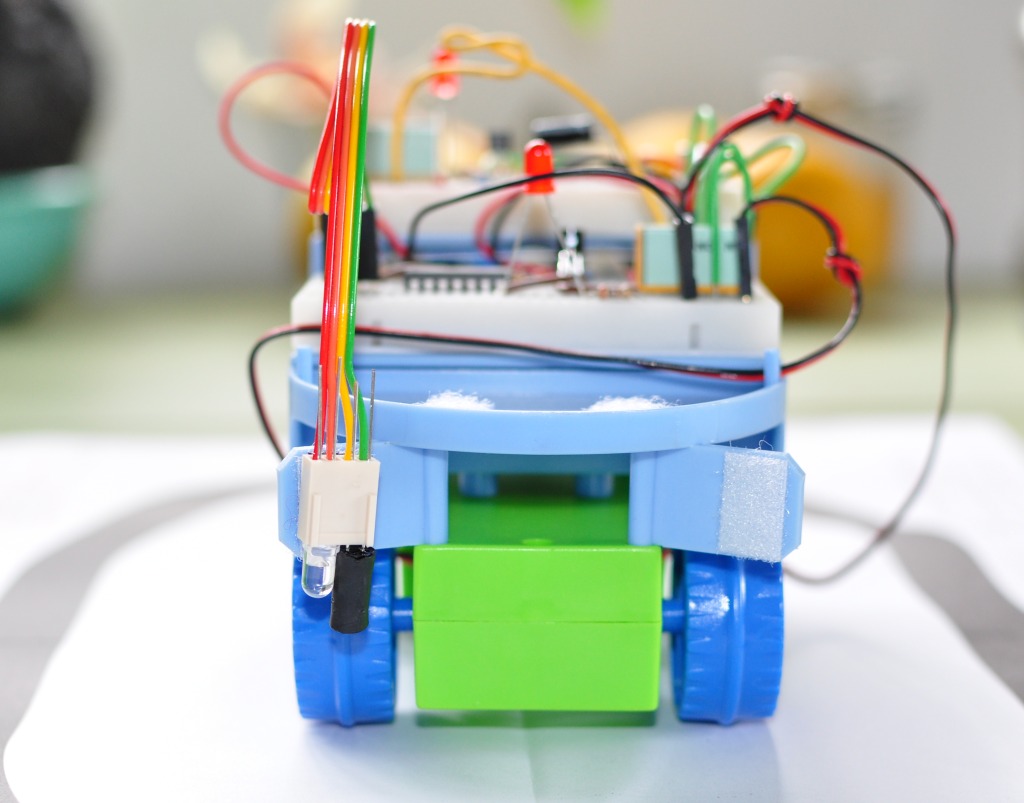
Red LEDs have been added to help you debug sensor placement. With the motor switch in the OFF position, watch the red LEDs and move the robot from left to right across the provided black line, if everything is working properly the light should go on and off completely as the black line is passed.
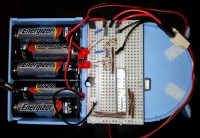
Note: The two breadboards shown below are identical, the front one goes to the right motor, the back one to the left motor. If you cannot see how a component is placed on one breadboard, just check the other one as they are the same.
If the IR reflective sensors are not working correctly here are some things to try:
Bend the clear IR emitter so that it faces perfectly forward.
Move the sensors closer or futher from the ground – it is possible to go too close! about 3/4″ (19mm) is a good distance from the ground table surface.